


工博士工业机器人导轨应用案例以滚轮方型导轨为基础的工业机器人导轨,可作为和工业机器人配合的第七轴来使用,如下是两个典型案例: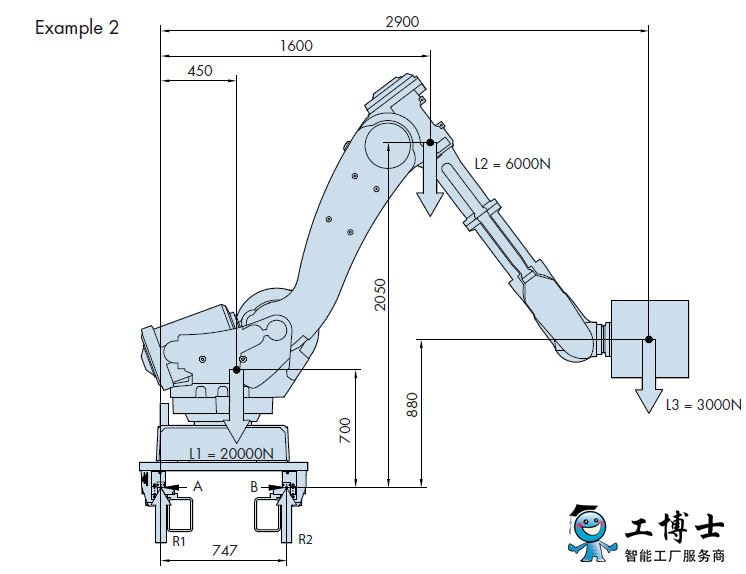
这是一个自动抓取放置应用,采用的传动方式是齿轮齿条驱动,两根滚轮方形导轨中一根为带齿条滚轮导轨。机器人需要沿着导轨在两个工位之间移动,行程为10米。机器人在移动的时候,机械臂会伸展开来,如上图所示。
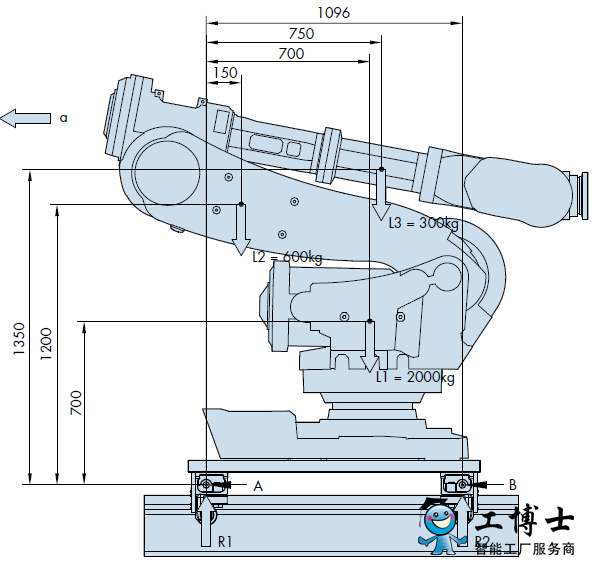
机器人在移动的时候,机械手臂是收起来的。机器人需要在两个工位之间进行移动,具有比较快的加减速,计算寿命时,需要考虑加减速时产生的力的影响;加速度为1m/s2, 加速到3m/s;然后恒速;然后减速直至停止,减速度为0.4m/s2。行程为20米。同时还需要考虑,当机器人在两个工位停止并进行相应的操作,滚轮轴承的静载荷是否满足要求。